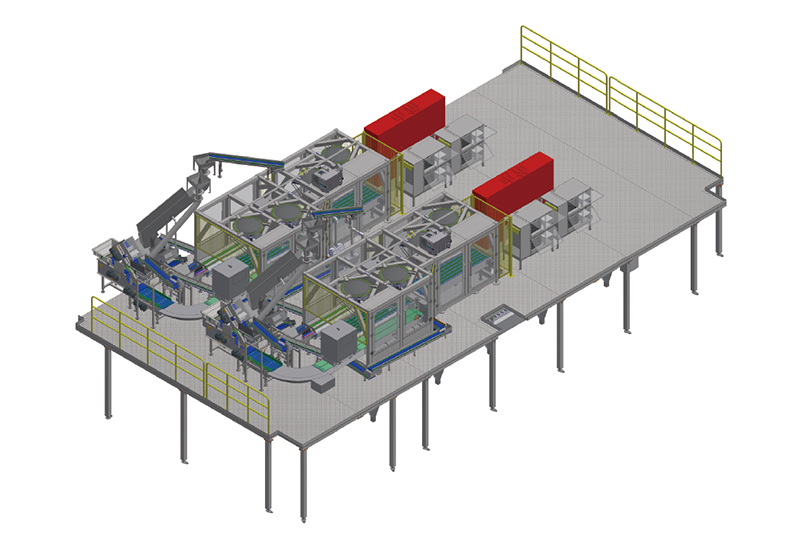
Delta Robot သည် System ကိုပေါင်းစပ်ထားသည်။
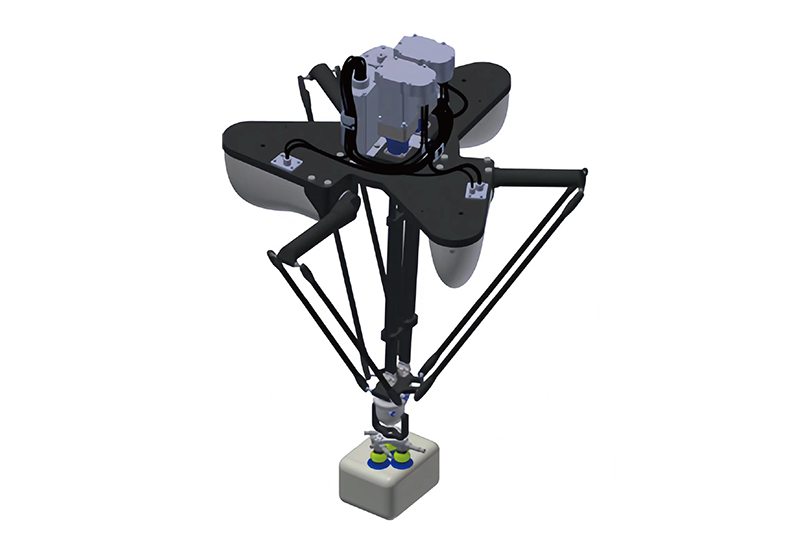
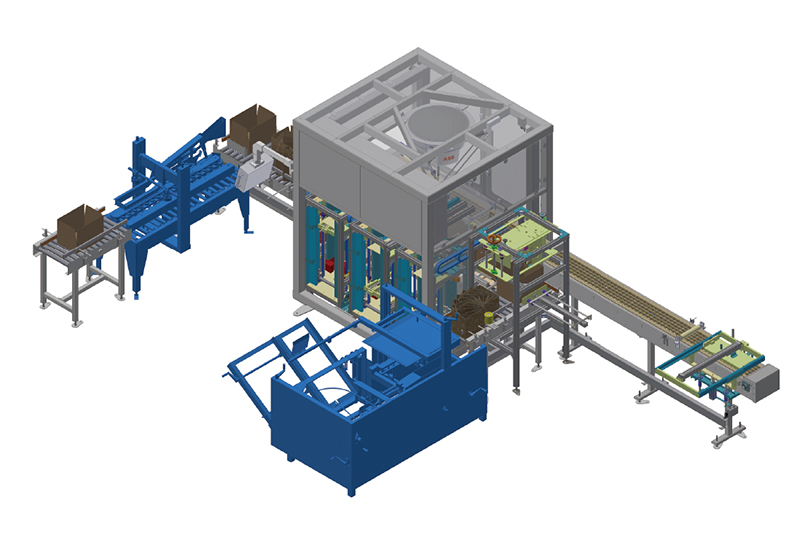
မှာယူခြင်းမရှိသော အတွင်းထုပ်ပိုးပစ္စည်းများကို သိုလှောင်မှုမှ ထုတ်လွှတ်ပါသည်။ servo unscrambler ဖြင့် စီထားခြင်းခံရပြီးနောက် ထုတ်ကုန်အနေအထားကို အမြင်အာရုံစနစ်ဖြင့် အသိအမှတ်ပြုပါသည်။ case packing machine အတွင်းတွင် အမြင်အာရုံစနစ်သည် ပင့်ကူစက်ရုပ်နှင့် အချက်အလက်များကို မျှဝေပေးမည်ဖြစ်ပြီး ပင့်ကူစက်ရုပ်သည် ထုတ်ကုန်များကို သက်ဆိုင်ရာ ပြင်ပထုပ်ပိုးမှုထဲသို့ ဖမ်းပြီး နေရာချပေးမည်ဖြစ်သည်။
လျှောက်လွှာ
အမှုန့်နို့လက်ဖက်ရည်၊ ကြာဇံ၊ အသင့်စားခေါက်ဆွဲစသည်ဖြင့် ပုလင်းများ၊ ခွက်များ၊ စည်များ၊ အိတ်များကဲ့သို့သော အမျိုးအစားခွဲခြင်း၊ ခွဲခြားသတ်မှတ်ခြင်းနှင့် ဖမ်းယူခြင်းအတွက် သင့်လျော်ပြီး ပြင်ပထုပ်ပိုးမှုအတွင်း၌ ၎င်းတို့ကို ထားရှိပါ။
3D ပုံဆွဲခြင်း။


ထုပ်ပိုးမှုလိုင်း
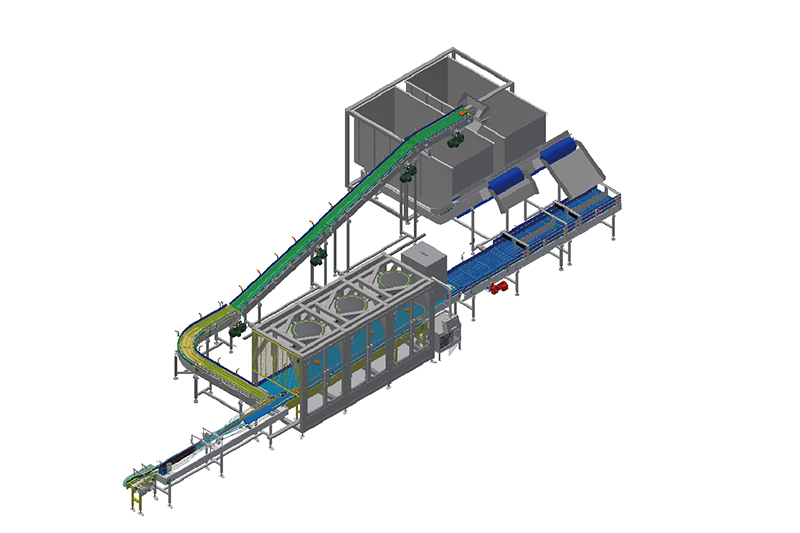
Unscrambler လိုင်း

လျှပ်စစ်ဖွဲ့စည်းမှု
| PLC | Siemens |
| VFD | Danfoss |
| ဆာဗိုမော်တာ | Elau-Siemens |
| Photoelectric အာရုံခံကိရိယာ | နေမကောင်း |
| Pneumatic အစိတ်အပိုင်းများ | SMC |
| ဖန်ပြင်ကိုတို့ပြီးအသုံးပြုရခြင်း | Siemens |
| ဗို့အားနိမ့်ကိရိယာ | ရှနိုက်ဒါ |
| ဂိတ် | ဖီးနစ် |
| မော်တော် | SEW |
နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ
| မော်ဒယ် | LI-RUM200 |
| တည်ငြိမ်သောအရှိန် | 200 ကျပ်/မိနစ် |
| လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | 380 AC ±10%၊50HZ၊3PH+N+PE။ |
နောက်ထပ်ဗီဒီယိုရှိုးများ
- မြစ်ဝကျွန်းပေါ်စက်ရုပ် အမျိုးအစားခွဲခြင်း၊ အစာကျွေးခြင်း၊ မွှေနှောက်ခြင်းနှင့် အထုပ်ထုပ်ခြင်းလိုင်း






